
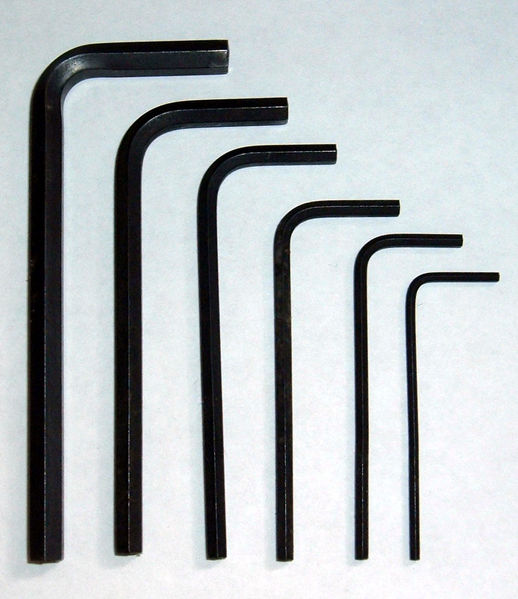

Llave Allen es la herramienta usada para atornillar/desatornillar tornillos, que tienen cabeza hexagonal interior. En comparación con un tornillo philips resiste mayores pares.
Originalmente Allen era una marca registrada de Allen Manufacturing Company en Hartford, Connecticut en 1943. Pero ya en 1936 la compañía Bauer & Schaurte Karcher en Neuss, Alemania, inventó ese sistema. Por ello, este sistema se conoce como Inbus (Innensechskantschraube Bauer und Schaurte) en muchas partes del mundo. Esta empresa lo patentó en Alemania y los Países Bajos. En Italia se conoce como brugola, por Egidio Brugola, quien la inventó en 1926.
Normalmente es usado para tornillos prisioneros.
Algunas características de este tipo de llave son:
Diseño simple, pequeño y ligero.
Las superficies de contacto del tornillo (internas) están protegidas de daños externos.
Puede usarse con destornilladores o llaves sin cabeza (ayudándose con una llave fija por ejemplo).
El tornillo puede introducirse en su ranura usando directamente el destornillador (acoplan perfectamente).
Hay seis superficies de contacto entre el tornillo y el destornillador.
El par se reparte por toda la llave.
Se puede usar con tornillos muy pequeños.
La fabricación de llaves Allen es muy simple, así que en muchas ocasiones se incluye una junto con los tornillos.
También llamada Parker o llave Bristol.



 :
:



